Changing focuses from the past couple of weeks, this week I want to focus more on the TA-led experiences that have happened in the past week. To begin with, last Thursday after we were done with work for the day, there was a scavenger hunt that a bunch of us took part in. I was on a team with Vanessa, Abby, and Teja and we went all out for the win. We were sprinting all over the campus and we had a pretty good strategy for it. I went and read the clues so that they could all think about what they meant since they know Rice a lot better than me. We also tried to get to most of the clues first so that we could get the coins at the clues which counted for two points each. That strategy also led to me sprinting past Shannon and Shivani’s team to try to get to a clue before them, but unfortunately it was all kinda pointless because the coin wasn’t even there. However, it did lead to us tying for the win with the team that had Shannon, Shivani, and Kaitlyn. As a reward, we got to decide the new name and photo for the Group Me we have with all of the interns and TAs. We haven’t decided on a name just yet but I’ll let you know when we do.
Moving on into this week, we had another activity after work on Tuesday with a group of us playing sand volleyball for a couple of hours. It was actually really fun and an insanely good workout that everyone was dying from afterwards. I was covered in sweat and sand on the drive home which was not ideal for my car but I had a good time so who cares. I think we’re going to play again this week so that should be fun. Hopefully we can get more people to play, although it was still fun last time with like 8 of us playing. We also got lunch from the TAs on Wednesday and they catered Chinese food for us. It was probably one of the most satisfying meals I’ve ever had, almost just because I was really hungry and the food was good but I liked it. I really feel like these experiences that we’re having with our teams and with everyone in the internship is making everyone a lot closer. There’s definitely a noticeable difference in the conversations everyone is having just at lunch and in general. People are getting closer so more jokes are being made and I feel like everyone is just happier in general. It was a little awkward towards the beginning of the internship but that’s just kinda how it’s gonna go with a group of people who are mostly just meeting each other for the first time. I really like the dynamic now though, and I feel like I could talk to just about anybody in the internship, TAs included, for a long time.
We’re halfway through the internship already! Week three has been a lot of fun as we developed and iterated through our very own art projects — initial low-fidelity prototypes. We’ve been continuously learning more and more about the intricacies of our project, from the scalability of materials to the quantitative analysis of ultraviolet light dosage.
When I started this internship as a remote intern, I didn’t think I would be a huge part of prototyping. My idea of developing prototypes was using 3D printers and complex laser cutters while configuring electrical circuitry. While these are important components of prototyping, prototyping consists of so so SO much more (I didn’t expect prototyping to be as artsy as it is!), and I feel as connected to the project as the rest of my team members do.
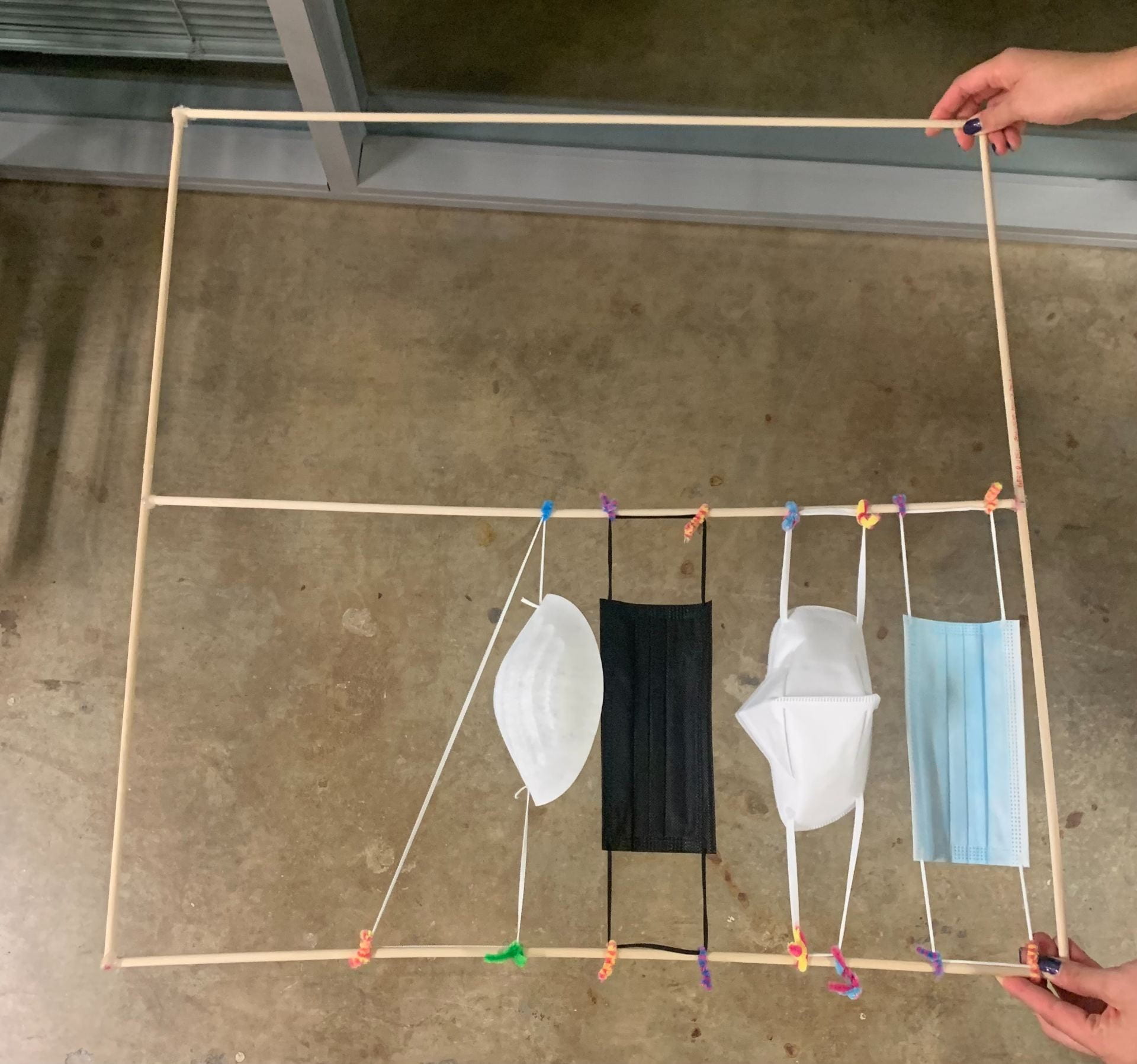
This week, I was able to learn the importance of low-fidelity prototyping, which so happens to be the first foundational step when engineering a new product. Our initial representational and ergonomic prototypes were an oil drum with a hanging framework attached to the lid, and a square box with a square framework that could be taken out of the box (peep the videos on last week’s blog!). Both of these prototypes have their pros and cons. On the one hand, the square box is much easier to produce and manufacture owing to its standard geometry. It is also easier to customize so that it fits our criteria and design needs. However, the oil drum, specifically chosen for its ease of accessibility in the settings we are designing for, can potentially allow us to produce at a large scale, despite having issues with usability and customizability.
To decide between our ideas, we met with international collaborators as well as the design coaches at Rice 360. After considerable deliberation, our team decided to go ahead with the oil drum idea. Despite the freedom a square or a novel shape may allow us, it would be useless if it could not be sustainably reproduced in a low-resource setting (or, worse, be imported from high-resource areas, only to end up in a graveyard of medical devices). With our overall structure finalized, we began work on designing the framework of UV bulbs and masks.
One of the hurdles of designing a framework is the exposure to UV light that the masks are allowed to receive. Too little exposure would mean the masks would not be sufficiently sterilized. Too much exposure might reduce the number of sterilization cycles masks can go through with their fit and structural integrity intact. After literature review on similar experiments, I found that a UV dosage of ~1.5 J/cm2 with the frameworks we are trying to engineer would ensure that the lowest dosage any part of the mask receives is 0.8 J/cm2 while the maximum is 3.0 J/cm2 (for reference 0.05 J/cm2 is usually enough to kill viruses and bacteria).
To end the week, we gave our mid-internship presentations. It presented a wonderful opportunity to learn more about the work everyone has been doing over the past few weeks. I was thrilled to learn about the feedback that everyone had to offer us! The occasion also presented a great opportunity for some team ~hybrid~ photos (see below). I’m excited for the second half of the internship!
This week, our team shifted our design plan. Instead of using a thermos, lunchbox, or other pre-made container as our heating chamber, we decided to build our own.
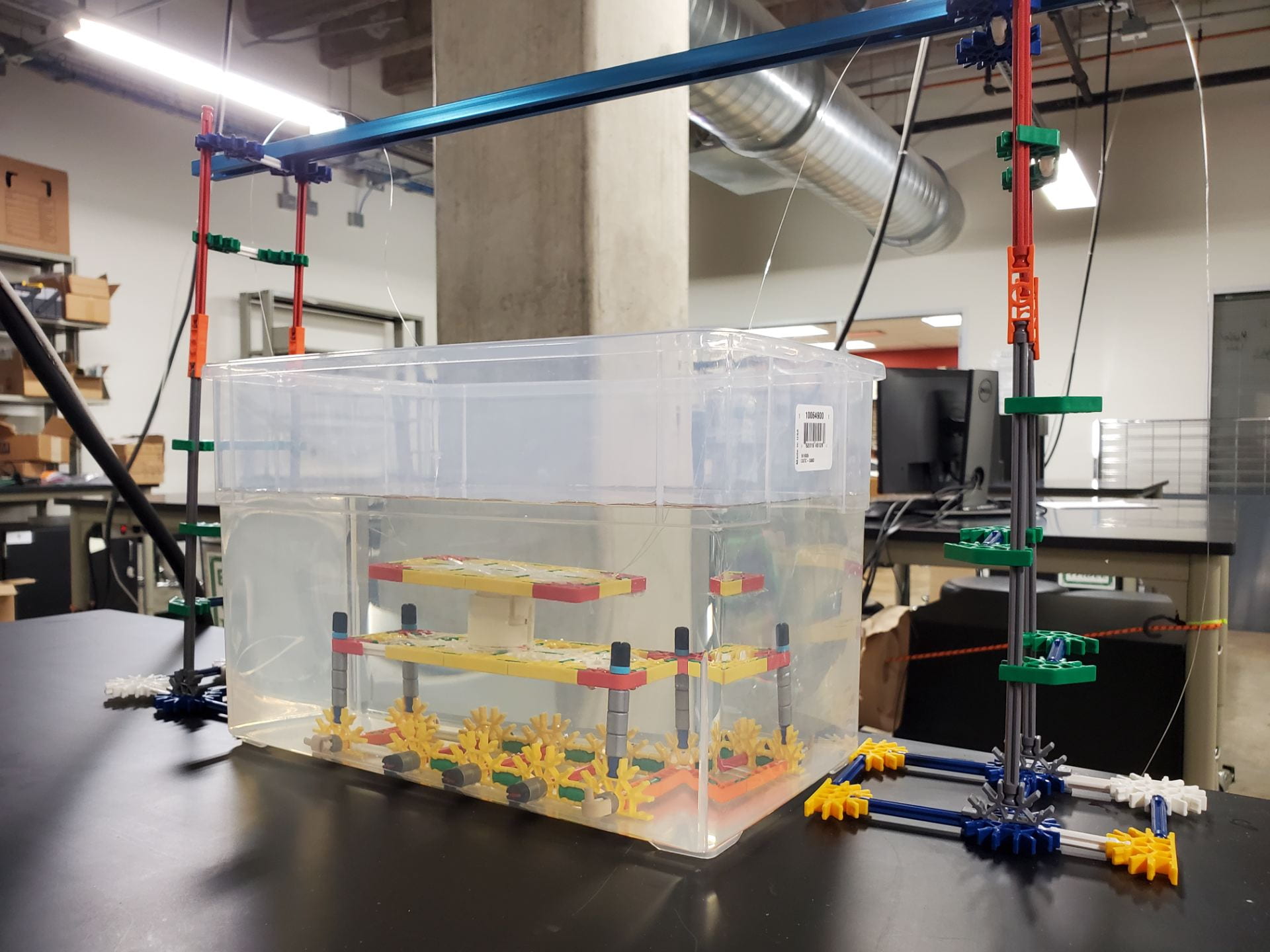
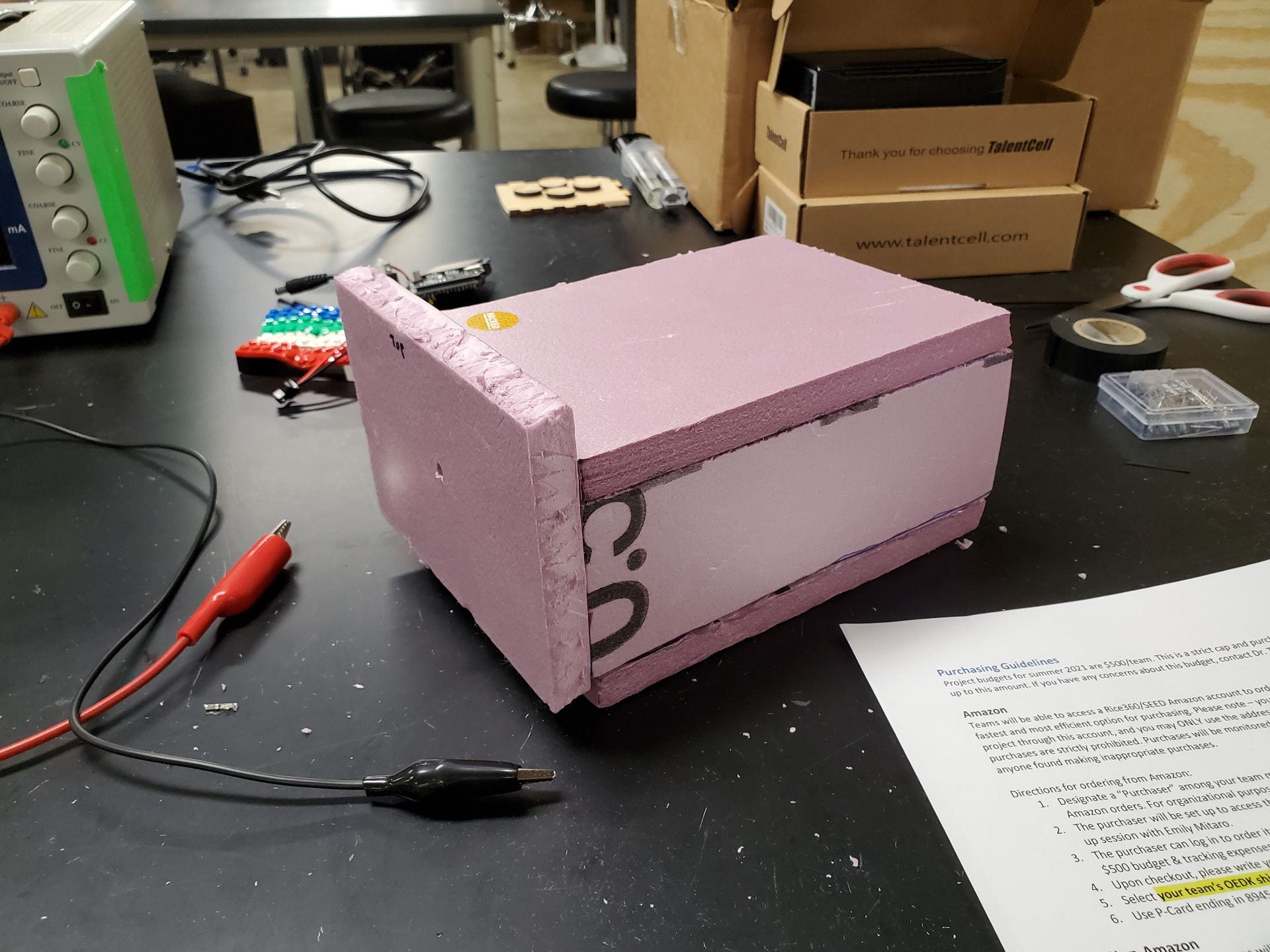
This is the first prototype of our two-chambered device. The smaller section (front) is the heating chamber, and has insulation and a reflective surface to avoid heat loss. The thermistor and heating pad wires go through a small hole in the divider into the larger electronics chamber (back) which is not warm. We settled on this concept because it seemed like the easiest to make open-source as well as the most customizable.
Making this prototype was an interesting process. First, we needed a proof-of-concept to see if something like this could even retain enough heat to be effective, so we ran a few tests with a box made entirely of the purple insulation above. It worked, so we moved on to the laser-cut version. We started with an online box maker and then proceeded to make additional adjustments to add in the barrier in the middle. Then we cut it and began gluing the box together. Only the front and back panels are removable ‘doors’–– in the end the top was glued on as well. When we first opened up the wood glue, there was a sort of film of dried, yellowing glue blocking the tube, which was dubbed the ‘glue monster’.
After the prototype was fully assembled, it became clear that the electronics chamber is much larger than necessary. In our next iteration, we plan to make a ‘stacked’ design, where the electronics chamber is on top of the heating chamber and shares the same small footprint, so it is much smaller and can more intuitively be put in a bag right side up.
Electronics
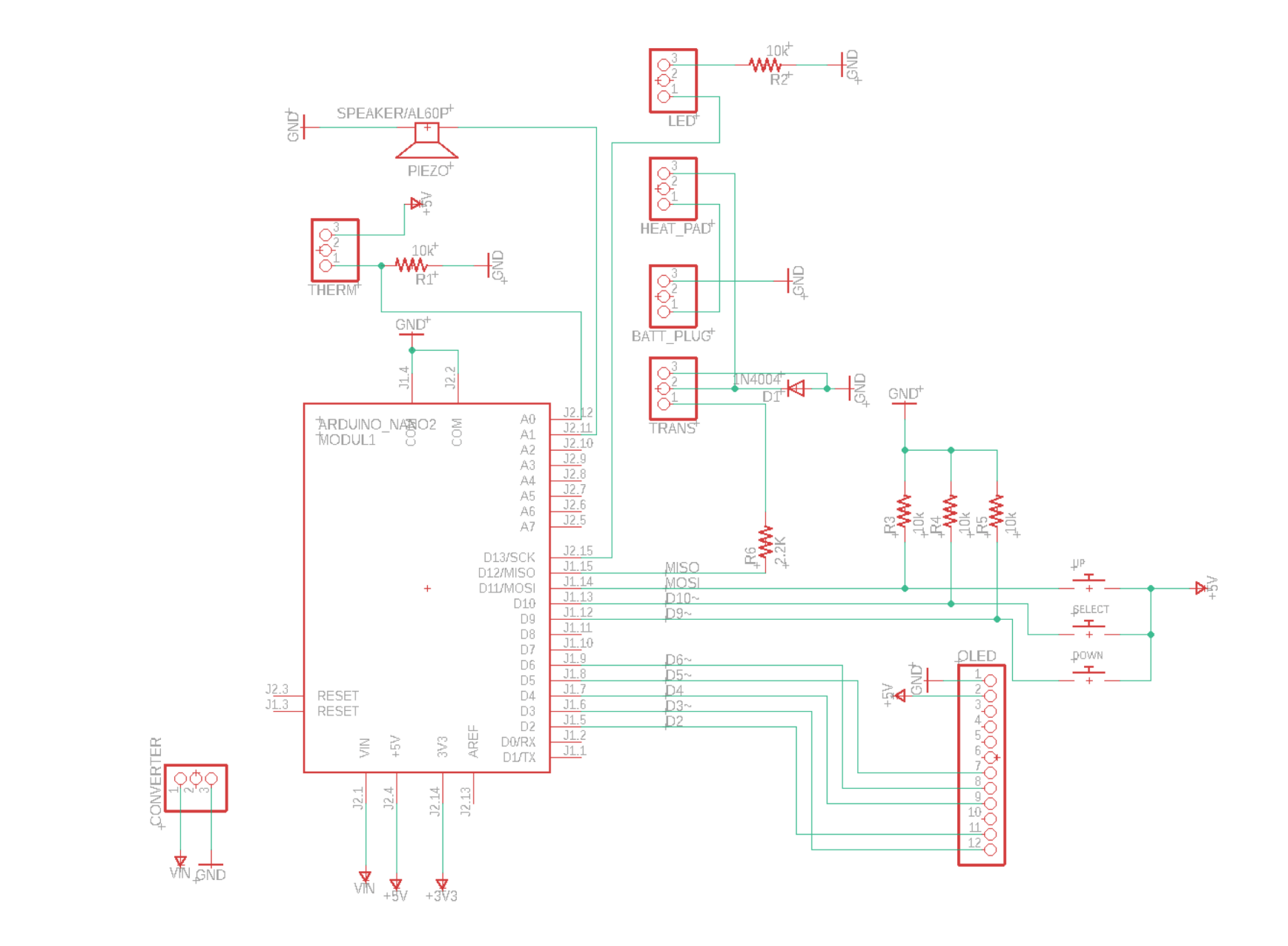
The other major project I worked on this week was continuing to troubleshoot the circuit. My teammate Kenton and I began disassembling the various components––thermistor, n-channel transistor (the component that tells the heating pad when to turn on and off), heating pad, display screen, and Arduino––to get them to work separately before combining it all together again. A very helpful electrical engineering professor explained how the transistor works to us, and we realized that the wiring had previously been wrong. The heating pad worked in our tests and so did the Arduino. We had two primary ‘Eureka’ moments; one with the thermistor, which after careful calibration now reads temperatures accurately, and another with the screen, which we were able to activate for the first time on Wednesday:
Unfortunately, we were only able to get it to work with an Arduino Uno (shown above), and not with our Arduino Nano, which is much smaller, despite using all of the same pins and the same code. According to online help forums, many people have had this problem in the past, and we were unable to find any satisfactory solutions. We have a meeting with the senior design team member who previously figured out how to make it work with the Nano on Monday, but if that does not work we may need to switch to using the Uno.
Next week, we plan to reassemble the entire circuit, and if everything works properly, graduate to soldering it on a perfboard, since soldered circuits are much more permanent and no one can accidentally knock out a wire. Once this and the new box is done, our first high-fidelity prototype will be complete and we can move on to the testing and evaluating stage of the engineering design process.
What a week! These past couple of days have been exciting to say the least.
Dr. Wettergreen came in for a prototyping workshop and gave us great feedback on our designs and helped point us in the next direction. He brought up the true lesson of the spaghetti noodle-marshmallow challenge (a design challenge presented to ENGI 120 students) which was to build under existing constraints. For the marshmallow challenge, the trick is to test continuously throughout the building process by placing the marshmallow on the structure while creating the tower instead of waiting until the very end to test it. For us, this meant that our next iteration would need to be designed to be submersible in saline.
The day after, we had midsummer presentations where we gave an overview of our work for the past three weeks. Afterwards, we had a client interview where we had the chance to update them on our progress and our prototypes. The THI team liked the track system for the vertical motion but also directed us away from the rocking motion and suggested trying to create a motion of a sine wave inside a sine wave, with each sine wave representing the individual heart and lung motions of different amplitudes and frequencies, with the coupled waves representing the cumulative motion.
We had our work cut out for us and launched into adjusting our prototypes.
Following Dr. Wettergreen’s advice, I constructed a functional prototype out of K’nex and PVC that could be pulled up and down under saline. Kaitlyn continued to work on the Arduino code while Sam and Chris explored another possible direction using solenoid coils.
The next steps I took involved a lot of CAD in SolidWorks. I had no experience with Solidworks or any CAD software (excluding a Fusion 360 workshop presented by Magdah) so I definitely struggled initially. With plenty of help, I became more familiar with the software and by the end of Monday, I was able to 3D print a track system involving concentric tubes with a notch to prevent the “inner tube” from slipping out. Thankfully, there were no huge problems with the design, but I did have to adjust some heights and dimensions. Additionally, I had to take one of THI’s existing designs and adjust it so the entire setup would not exceed the maximum height.
Like I said, it was a jam packed week.
Thankfully, we also had some time for relaxation and even a special surprise by the TA’s – catered lunch from Tiger Noodle House <3. Some of the interns also got together for a fun game of sand volleyball which was a blast.
I realized late last week that our team was moving too fast for me to remember all of our activities each day. Especially when reflecting on a full week of progress, it was incredibly difficult to pinpoint what we had been doing on Monday. This week, I started keeping a daily log of meetings, workshops, team discussions, and prototyping progress. Looking back upon Monday, I am stunned by how much we’ve learned this week. Even though one week will always be just 10,080 minutes, it feels like Team Petri-FI was able to stretch this week to its maximum.
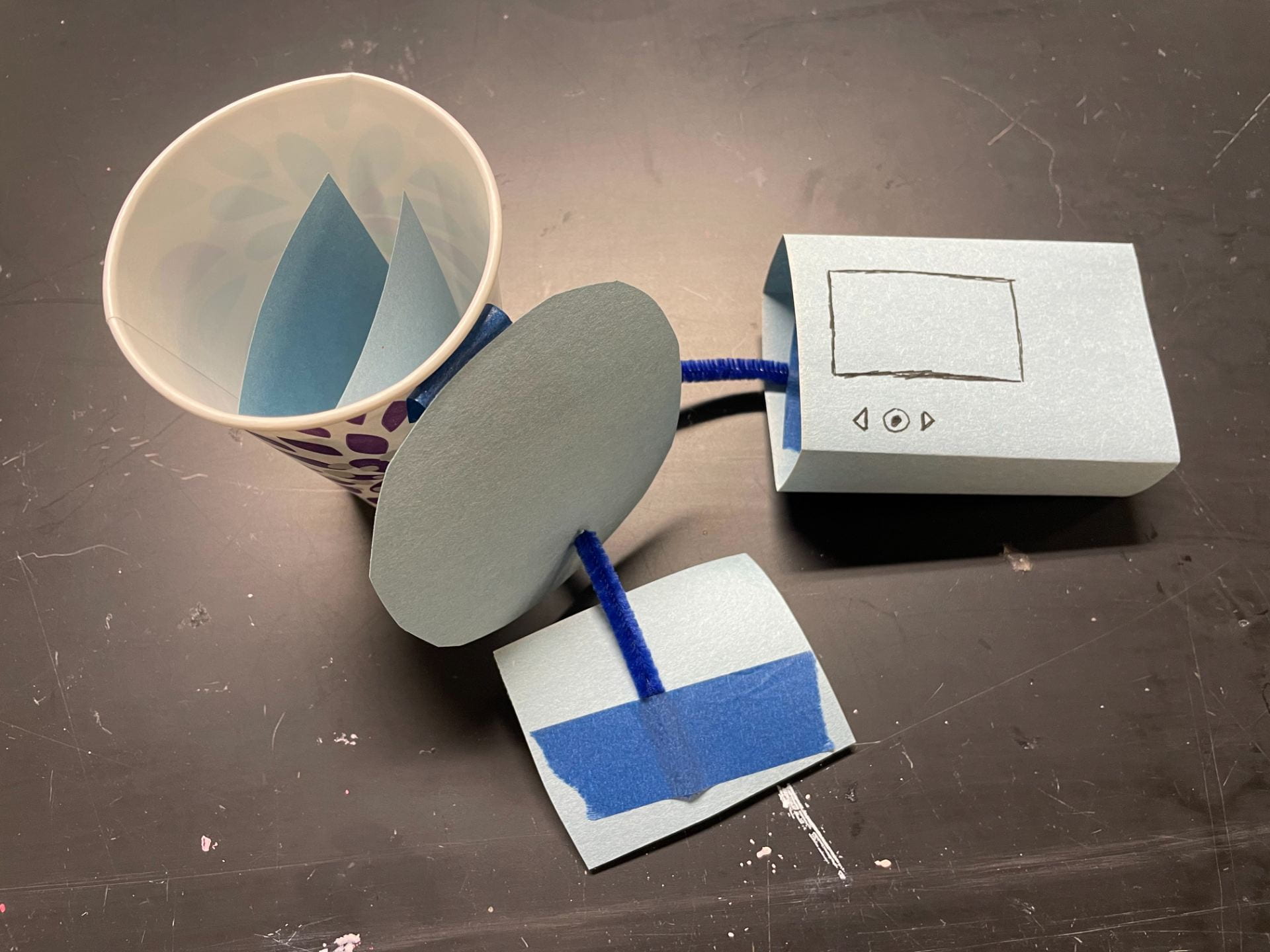
My low-fidelity thermos prototype of a thermos incubator. The paper cup (left) represents the heating chamber, while the paper box (right) represents the control unit and user interface.
We walked through the OEDK doors on Monday with many question marks. We still had not completed the breadboard circuit for our incubator, so we had yet to test the code or the heating pads. So far, we had formed a stronghold of bright ideas, but we hadn’t the time to apply them to our project. We were nearly satisfied with our heat transfer spreadsheet, which could now help us to estimate how small of a battery we may be able to use. However, we were still itching to bring our ideas to the physical realm and begin to test our theories against reality. Monday’s engineering design workshop was about low-fidelity prototyping. The principle behind creating prototypes out of the cheapest materials possible is that it helps teams to develop a tactile feel for their product. It can also aid communication within a team about physical specifications that would otherwise only be visible on a piece of paper or a laptop screen. Our team made a few prototypes out of construction paper, pipe cleaners, and aluminum foil, which helped us to learn about the overall form of our incubator designs and the connections that would need to be present in the final design. Also, after having worked mostly with the previous Minicubator and Moonrat prototypes, this was an excuse to make some designs of our own.
Troubleshooting
I have made another realization this week. Sometimes, progress doesn’t look like a new “thing” or a problem solved, or an item checked off of a list. Sometimes, progress exists only in your head. When approaching the problem of electronics, I had a mental hill to climb. On Tuesday, we spent some time with a faculty member, who walked through the previous team’s entire circuit and answered our electronics questions wonderfully. I came out of that conference room with an entirely new understanding of circuits, breadboards, and Arduinos. Before, I had seen our messy breadboard and thought to myself, “I never, ever, want to touch that thing.” However, I quickly found myself fascinated by all of the branching connections. There was a simplicity, or a new frame of mind, that I had just unlocked, as though my brain had received a firmware update.
I spent much of the week applying my new knowledge of breadboarding and circuits. After the initial build of the breadboard, we noticed a few obvious mistakes, and many more that were much less clear. On a similar front, I worked hard to read through the previous team’s code in order to better understand how the Arduino interacted with the overall circuit. I added dozens of comments within the code to function as a bread trail for our team, so that all of us would eventually be able to understand the programming behind our device. Even as we made steady progress through team discussions and delegated work, much of our effort was spent on mental progress, the kind that doesn’t show itself as a physical prototype or symbol of advancement. However, we made an exciting leap on Friday afternoon.
Zero to Sixty
On Friday, we had our mid-summer presentation, in which we detailed our team’s progress in the engineering design process. It was wonderful to see the progress of the other internship teams as well, especially after only three weeks had passed. Our team had to shift focus as we prepared to share our discoveries with everyone else. When the show was done, we had a fresh perspective on the overall project goals, and we apparently had a great dose of inspiration after lunch.
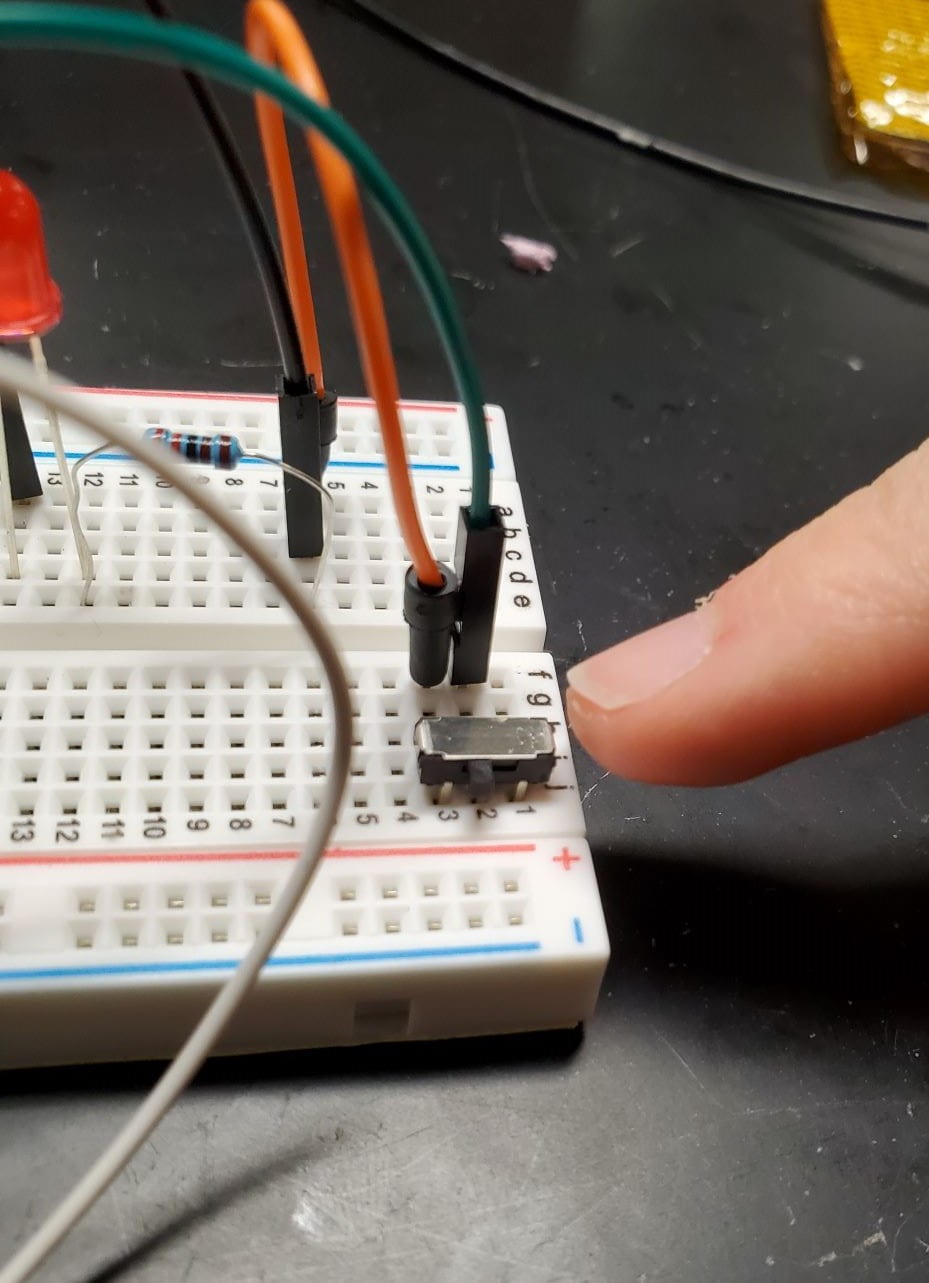
Our adorable little switch. It’s a shame we haven’t given him a name. Finger for scale.
We knew the importance of testing our heating chamber prototype idea as a proof-of-concept for an incubator. We already had a power supply, excessive breadboarding materials, and pink insulation foamboard; we had a vision, and we pursued it passionately. We epoxied together an insulated box, complete with a heating pad and a stand for our Petrifilms (the biological material that we would be incubating). Then, with my entirely newfound breadboarding skills, I created my first (and most adorable) circuit, equipped with an LED and a tiny little switch to turn on the heating pad inside.
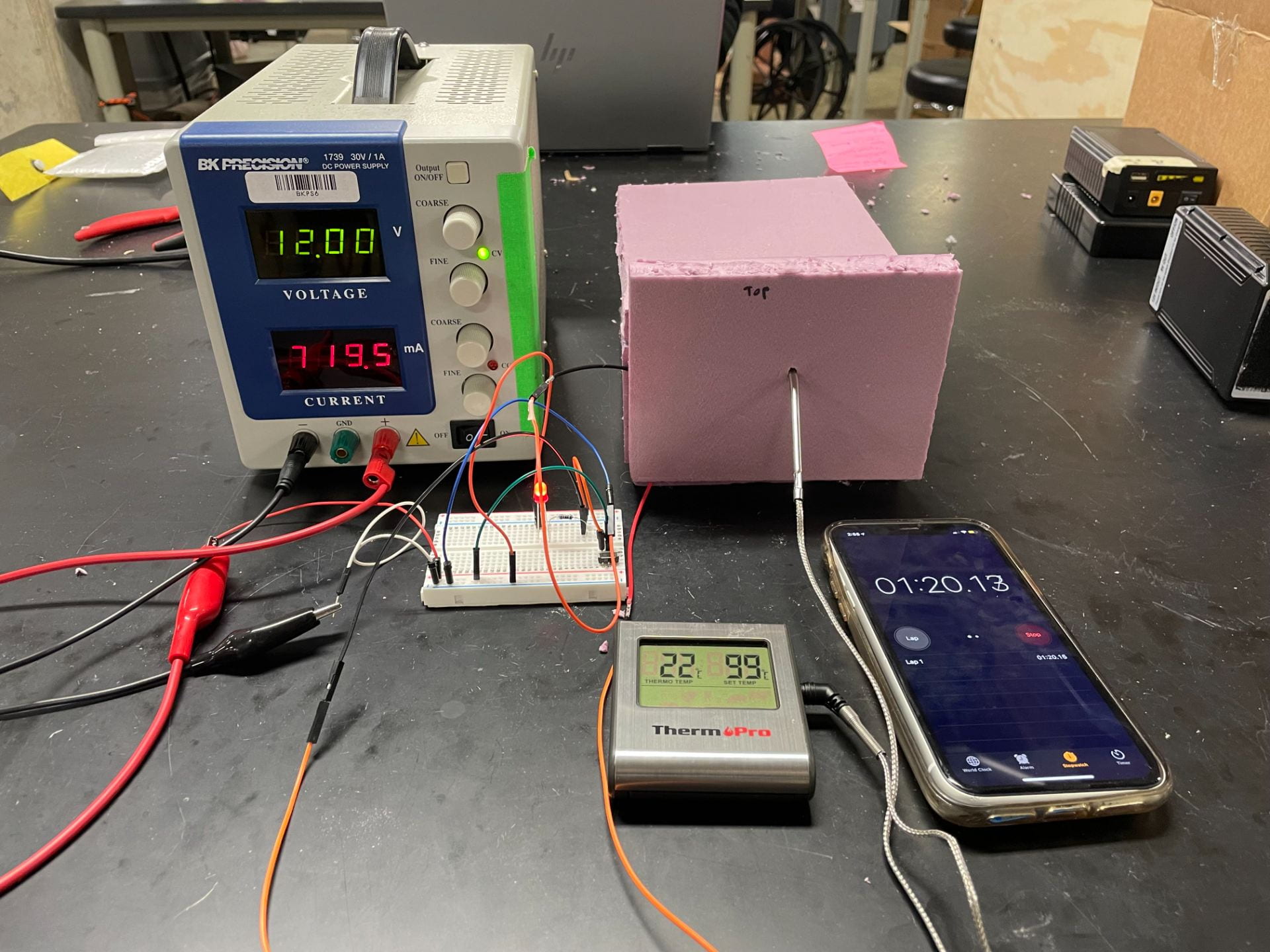
We turned it on. The instant the thermometer ticked up from twenty to twenty-one degrees Celsius, our team was beaming with delight. We’d done it! We’d conquered thermodynamics to heat our little chamber! Afterwards, it took no time at all to heat to the desired thirty-five degrees, and we collected data from a few heating and cooling cycles, until we were satisfied with our findings. Then came the main attraction.
Our testing setup. The power supply (left) is connected to our breadboard, which allows us to heat the pink incubation chamber (right).
“How about we turn it on, and just don’t turn it off, to see how hot it gets?”
“Sure.”
Now, believe me, this test was very useful for us. It would give us a theoretical limit on our chamber’s heat loss at high temperature differences, as well as informing us of any potential safety concerns in the case of malfunction. So we waited, and waited. And waited some more. Fifty. I was betting it wouldn’t get over sixty degrees, because our chamber was clearly not airtight. Fifty-five. Now, it was ticking up about a degree every five to ten minutes. Fifty-nine. Sixty! In fact, our chamber was losing so much air that we could smell something not quite right from the inside. Sixty-four. Sixty-five. Now, it was going about fifteen minutes between jumps. We swore that if it made it any further, we would stop it. Sixty-six! That’s sixty-six degrees Celsius (one hundred and fifty-one degrees Fahrenheit), or about as hot as a parked car during the Houston summer. We opened the chamber tentatively, not sure what we would find.
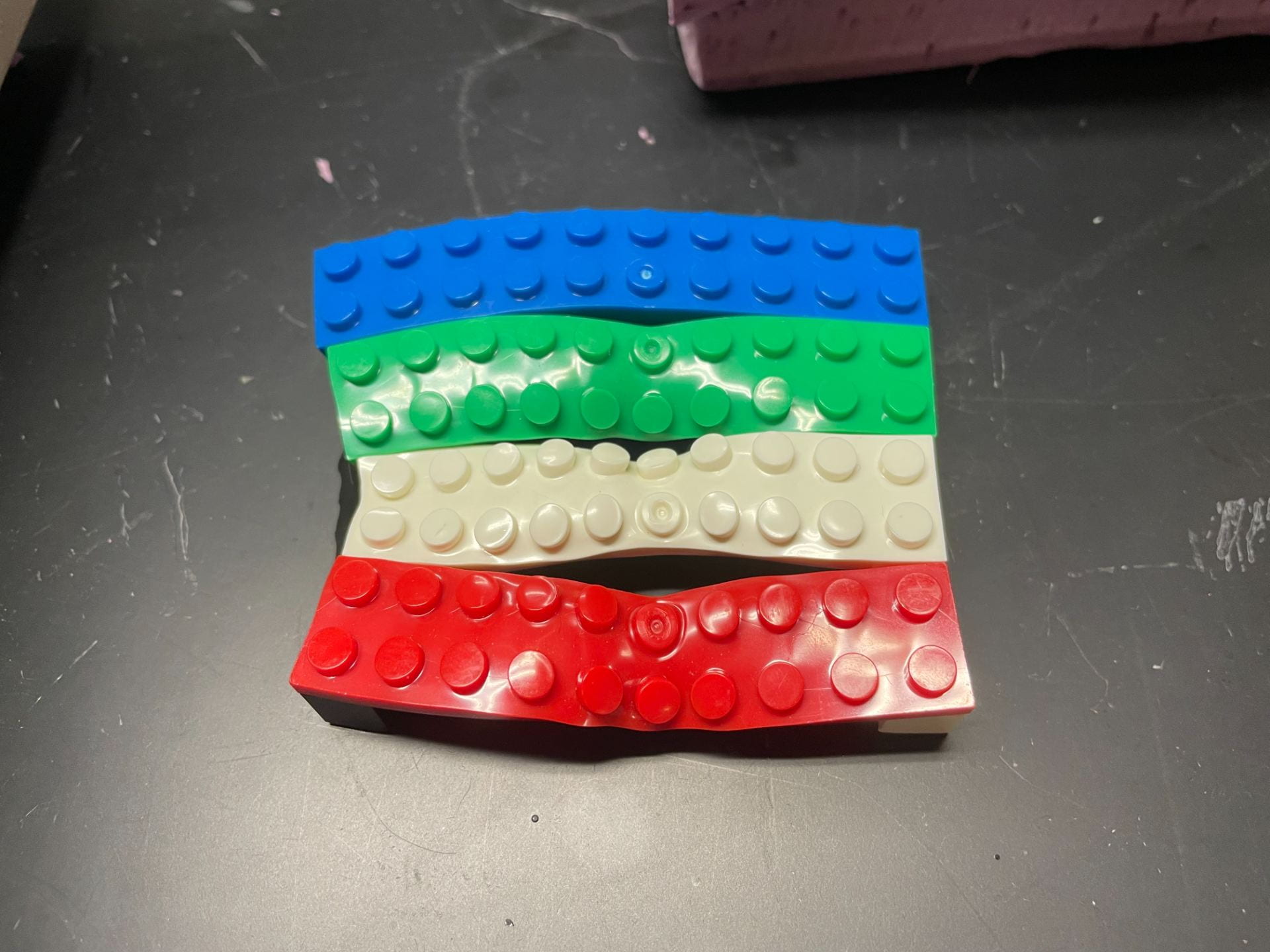
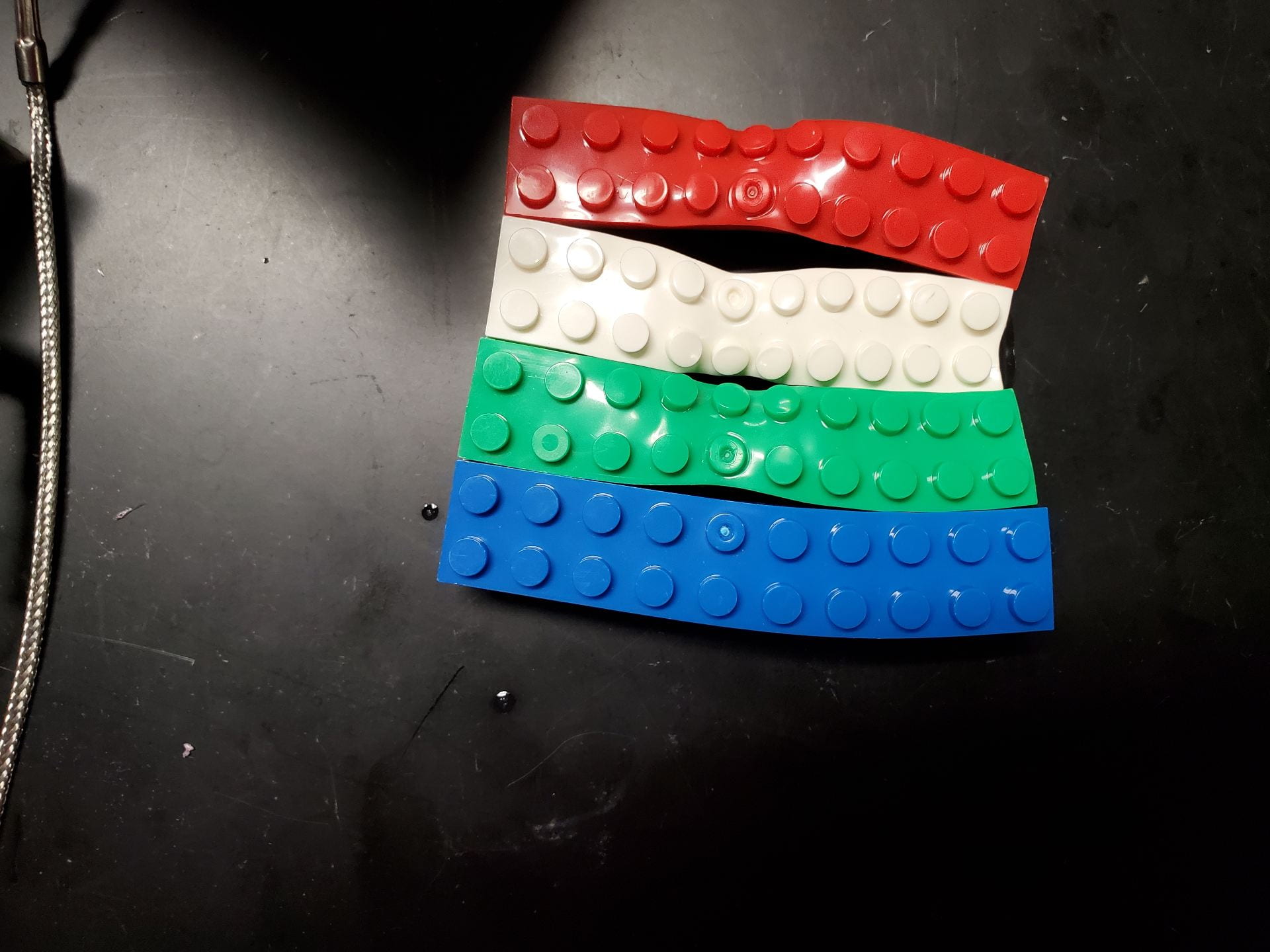
Melted Legos. The heating pad was stronger than we thought.
As I extracted our Lego Petrifilm stand, I immediately understood the smell coming from the inside. The heating pads, and their warm air, had melted the Legos! After extracting the heating pads themselves, I could see the crater of melted foam underneath. We understood the potential safety concerns, but we also knew that we would never expect temperatures anywhere near 60 degrees Celsius. While some teams would have been horrified by the power of their own device, we cheered for the success of our heating chamber. If melting Legos was this easy, we could surely keep a device at thirty-five degrees Celsius! Overall, Friday’s testing session concluded a long week, but we were energized by the tangible progress we had made.
I can’t believe another week has passed! Though a short week with the long weekend, week 4 has proven to be the week where Team PetriFI has made some of the largest breakthroughs in the internship thus far. While we are still trudging through debugging our breadboard, we have fortunately been able to meet with multiple mentors to work through the issues. In the meantime, we rigged together a circuit to begin testing the efficacy of our planned heating chamber.
Pictured below is the first iteration of the chamber: a box made of polyiso cut with an exacto knife and fashioned together/made air-leak proof with epoxy. The inside surfaces are covered in foil to aid in insulation and the heating pad simply rests on top of a bed of insulation so it’s not touching the foil (if it touches the foil, a lot of energy will be lost heating the foil before the air temperature increases significantly). We aptly called this low-fidelity prototype “Pink Box.” The most exciting part of this prototype for me though, was the tiny tiny tiny switch we used in the circuit to power on and off the heating pads. Upon some preliminary testing, we found this box to be quite robust in its incubation ability: even with a sizeable hole for the thermometer, it reached body temperature in under 8 minutes, at which point we switched off the heating pad, and then held that temperature (with the heating pads off) for 19 minutes. This was enough of a proof of concept for us to move forward with a more higher fidelity prototype.
For the next iteration of this prototype, we decided to laser cut a plywood chassis for the polyiso insulation attached to a chassis for the electronics and circuit. This time, we cut the polyiso with a saw more neatly and assembled it into the plywood box along with foil. Shown below is the setup:
:
We were lucky enough to be able to start testing this iteration with our knowledgeable client’s circuit system which automatically calculated the duty cycle (the percentage of time the heating pad needs to be on to hold body temperature over the course of a period of time). We found this iteration to have a duty cycle of under 10%. This is very exciting as it likely means our battery will be sufficient to incubate samples for 48 hours. To confirm this result, however, my teammates Kenton and Sara decided to run a variable voltage test where they hook the circuit up the a benchtop power supply and adjust the voltage until the chamber equilibrates to body temperature. The voltage at which this is reached can be used to create a ratio with the voltage of the battery we plan to use and then this data can be used to extrapolate how long our power source will last.
Next week, we will be meeting with our client and mentor, Dr. Read, to create a “code skeleton” to implement the user interface we designed. Because none of the team members have much experience coding Arduinos, I am not expecting to have a complete user interface coded by the end of the internship, but hopefully we will set up a framework for a new team to be able to quickly finish and iterate upon our design. To facilitate this, I also started a technical memo in the form of a journal article which will include all design files, code files, and assembly instructions along with motivations and justifications of the choices our team made.
Team Petri-FI has had an exciting week this week. We have a new design, and we’ve completed and tested a prototype, all in the span of two days! But first, we had some challenges.
In the last blog post, I talked about creating a breadboard to replace our fried PCB and left it with the ominous words, “Now, to debug it . . .” Debugging has not come easy, but we were fortunate enough to meet with multiple mentors who taught us a lot about electronics. The debugging is still in progress, but in the meantime we’ve built a small circuit for the purpose of heating the heating pads.
Now onto the exciting stuff: our new designs!
On Thursday, we presented our prototype ideas to Dr. Wettergreen, a professor at the OEDK who’s pretty much the expert on prototyping at Rice. We had two ideas for the heating chamber we would use: a double-walled thermos and a lunchbox. Dr. Wettergreen pointed out something that we hadn’t thought of: while both are open source in the sense that anyone can go online and order a thermos or lunchbox of similar size, they’re proprietary – you would need to order from a company, wait for shipping, etc. Why not just make your own box?
We started out with the “pink box.”
The aptly named “pink box.”
It’s made entirely out of polyiso insulation, and the inside contains the heating apparatus. The heating pad is inside on the bottom, and above that, perched atop a platform made of Legos, are the petrifilms. For this iteration, we wired up a breadboard externally, just so we could easily control our device as we began initial heat testing.
Just starting to heat.Finished.
Our data came out quite nicely – it only took seven and a half minutes to heat up from the frigid 20C of the OEDK basement to our target of 35C, and longer to go back down to 20C – 13 minutes. These are quite promising results.
After this test, we ran another one – maximum heating. There’s a legitimate reason for this: when the temperature remains constant, that’s the equilibrium point – the point where the amount of heat going in equals the amount of heat flowing out.
At this point, we can determine the heat loss in our device. (Honestly, though, we mostly just cranked the heat up to see how far it would go). It got up to 66C (150F)! And check out what it did to our makeshift petrifilm holder:
The legos melted. Poor Legos.
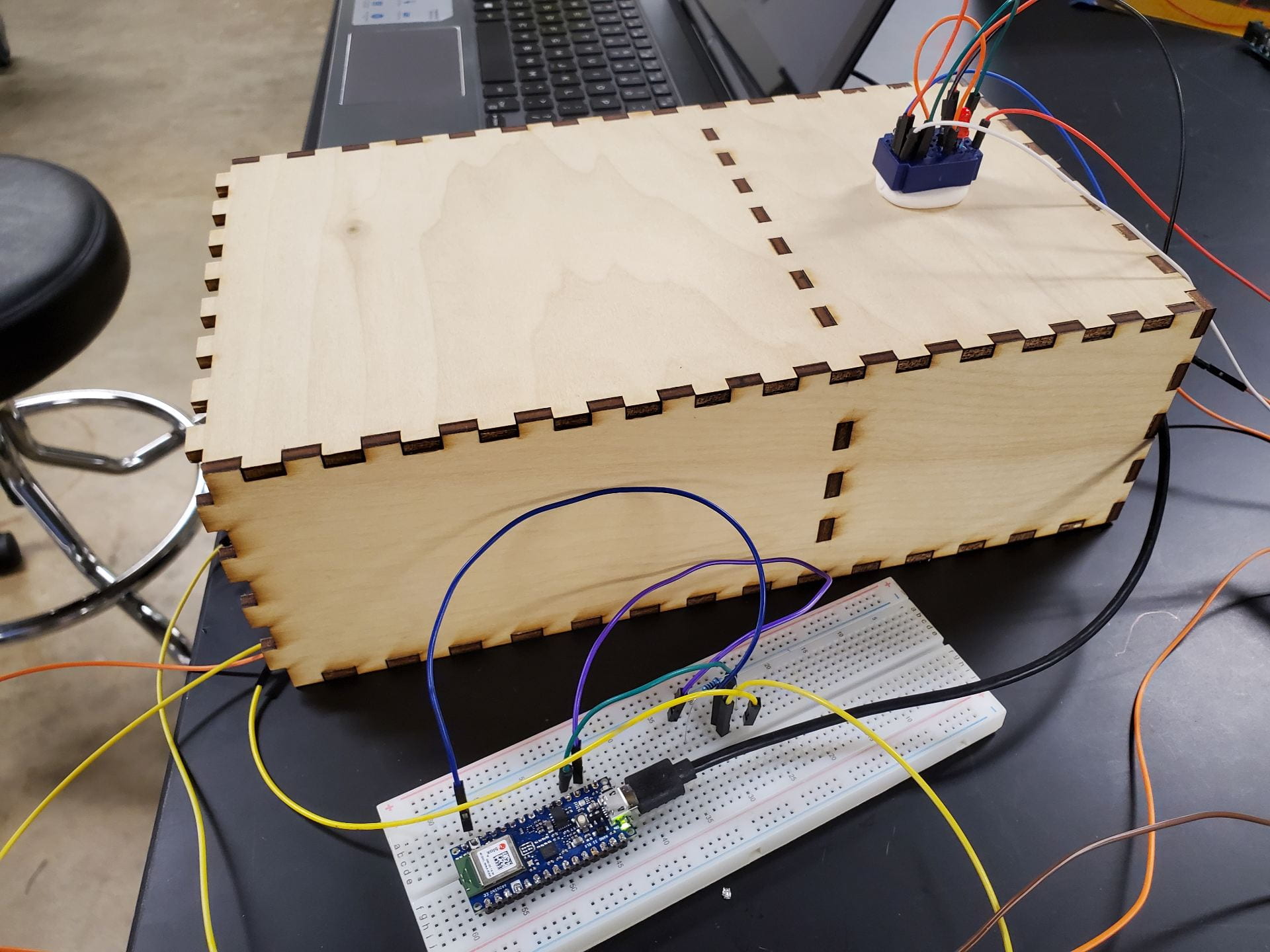
Once we determined that our device does, in fact, get hot, we planned to make something a bit more high-fidelity (i.e. not made of Legos – Legos are cool, but would you buy a piece of lab equipment made out of Legos?). The result was this two-chamber, laser cut wood box:
One side is heavily insulated with polyiso (what the pink box is made of), and the other holds the batteries. There’s a small hole in the middle to lead the wires from the battery to the heating pad. This design improves upon our pink box because it solves a problem that’s been plaguing us for a while: what exactly to do about the battery. Previously, our options were to have the battery externally connected – which exposes it to environmental dangers and also makes the device unwieldy to carry – or have the battery in the same space as the heating chamber – which exposes it to heat hot enough to decrease its lifespan. The two-chamber design means that everything is internal, but the battery is kept near ambient temperature.
As of writing this blog post, we are currently in the middle of performing heat tests on our new two-chambered device. We also have some other big improvements in the works, including an interactive mockup of the UI, a tentative vertical model of the two-chamber box, and of course, the long-awaited completion of the breadboard. Thank you readers for following Team Petri-FI on our design journey, and cross your fingers for good news next week about that darned breadboard.
*Content warning: My project deals with pediatric sexual abuse. Please exercise self-care while reading.
When Elise, Shannon, Alex and I demonstrated our low-fidelity “flip”, “twist”, and “swivel” models to our client over Zoom, we got some feedback that led us to consider aspects of our model we hadn’t, by any stretch of the imagination, thought about before. Sure, easy rotation like that of the “flip” model could be helpful, but what if nurses needed to be able to perform pelvic examinations regardless of whether they were sitting down or standing up? What if you had the (very probable) scenario of a child not positioning themselves at the most correct angle for the supine or prone orientations, and they were slightly tilted one way or the other? Our model needed to simulate the real pelvic exam experience.
This made the “swivel” model the clear winner – it was the only model that could freely rotate the labia and hymen to various angles above the horizontal. Still, our client pointed out that we’d need some sort of mechanism to lock the rod in various orientations, so it wouldn’t slip or swing when nurses interacted with the labia.
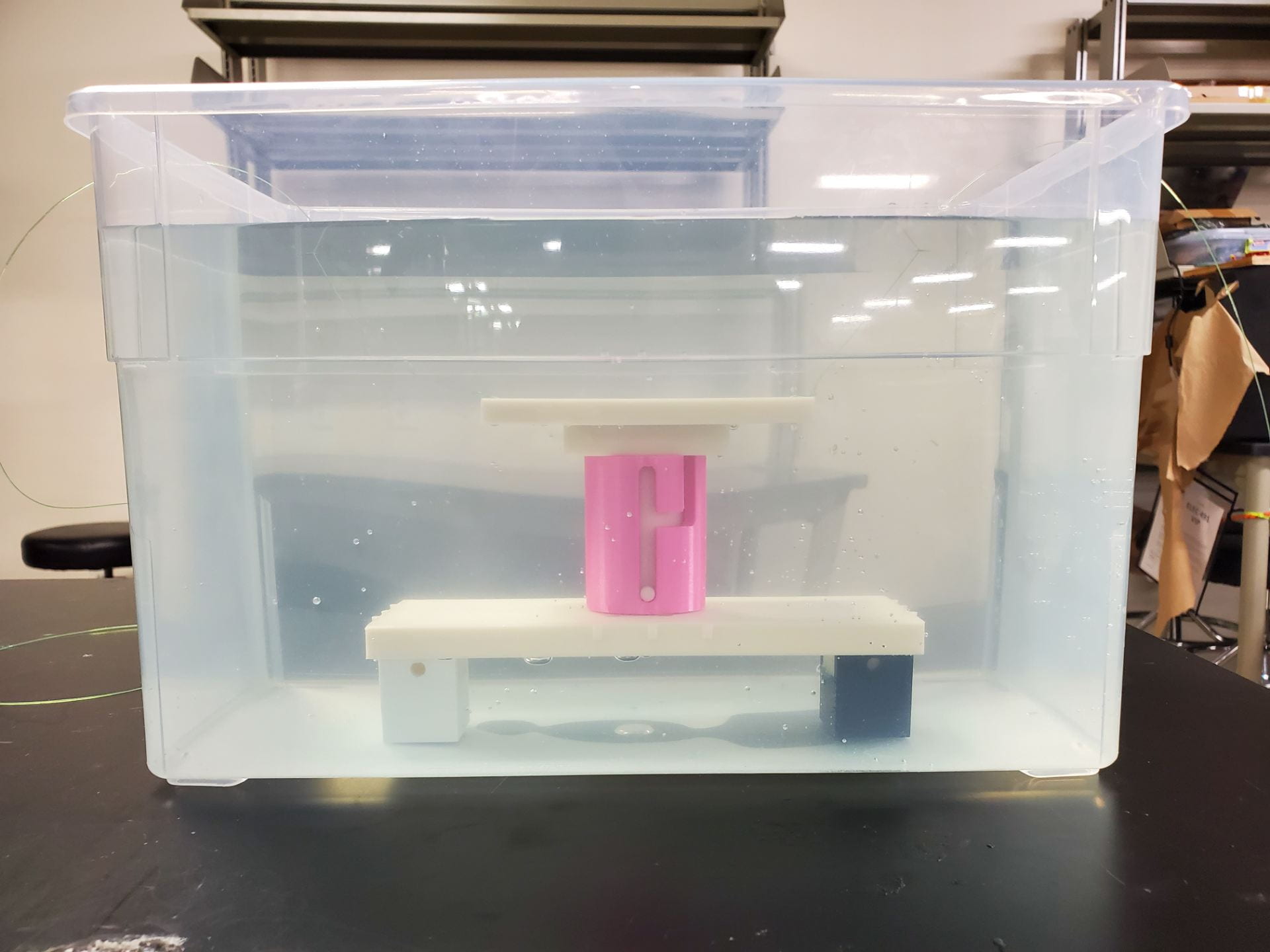
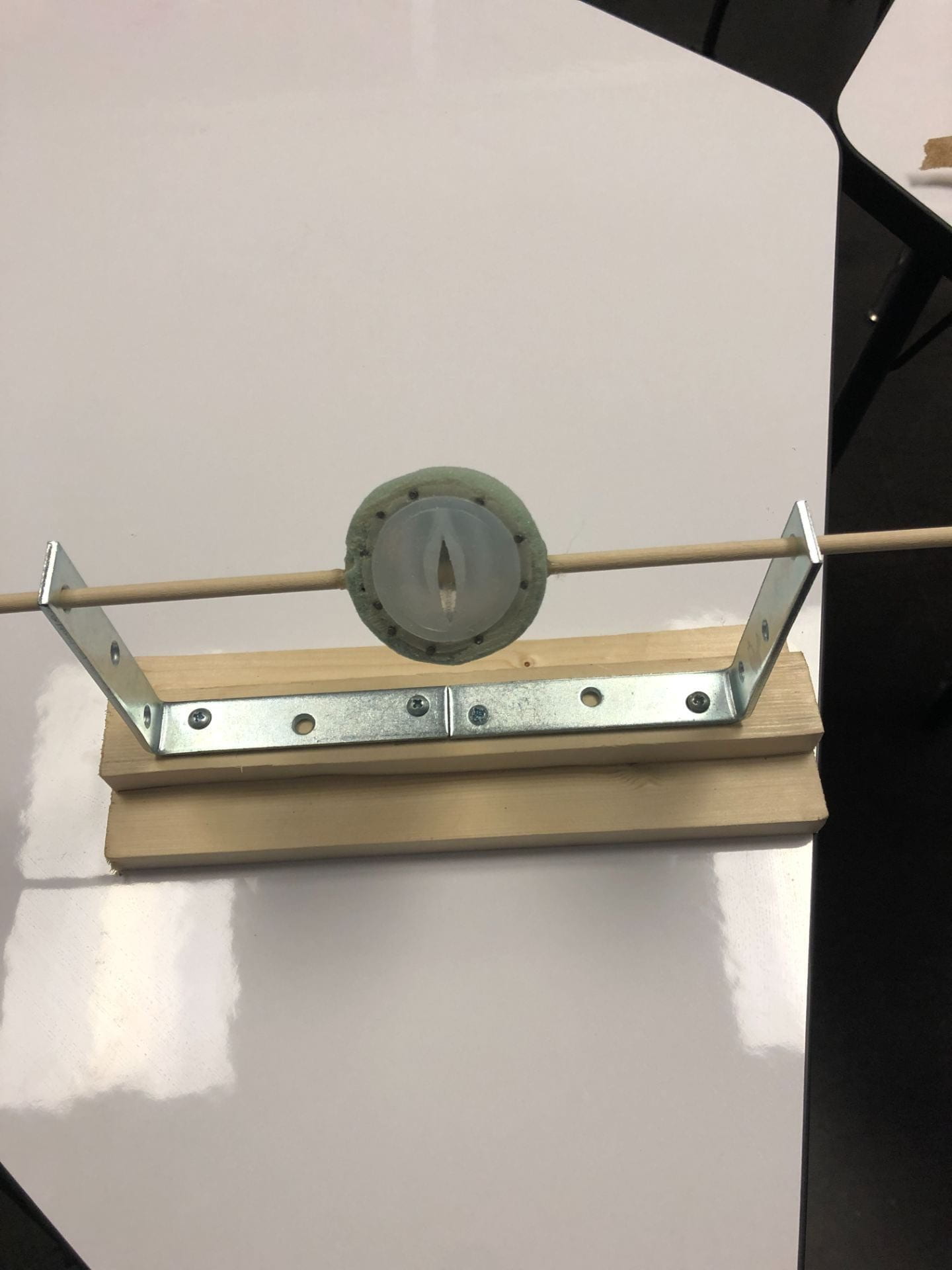
medium-fidelity swivel model w/ Dragon Skin labia!
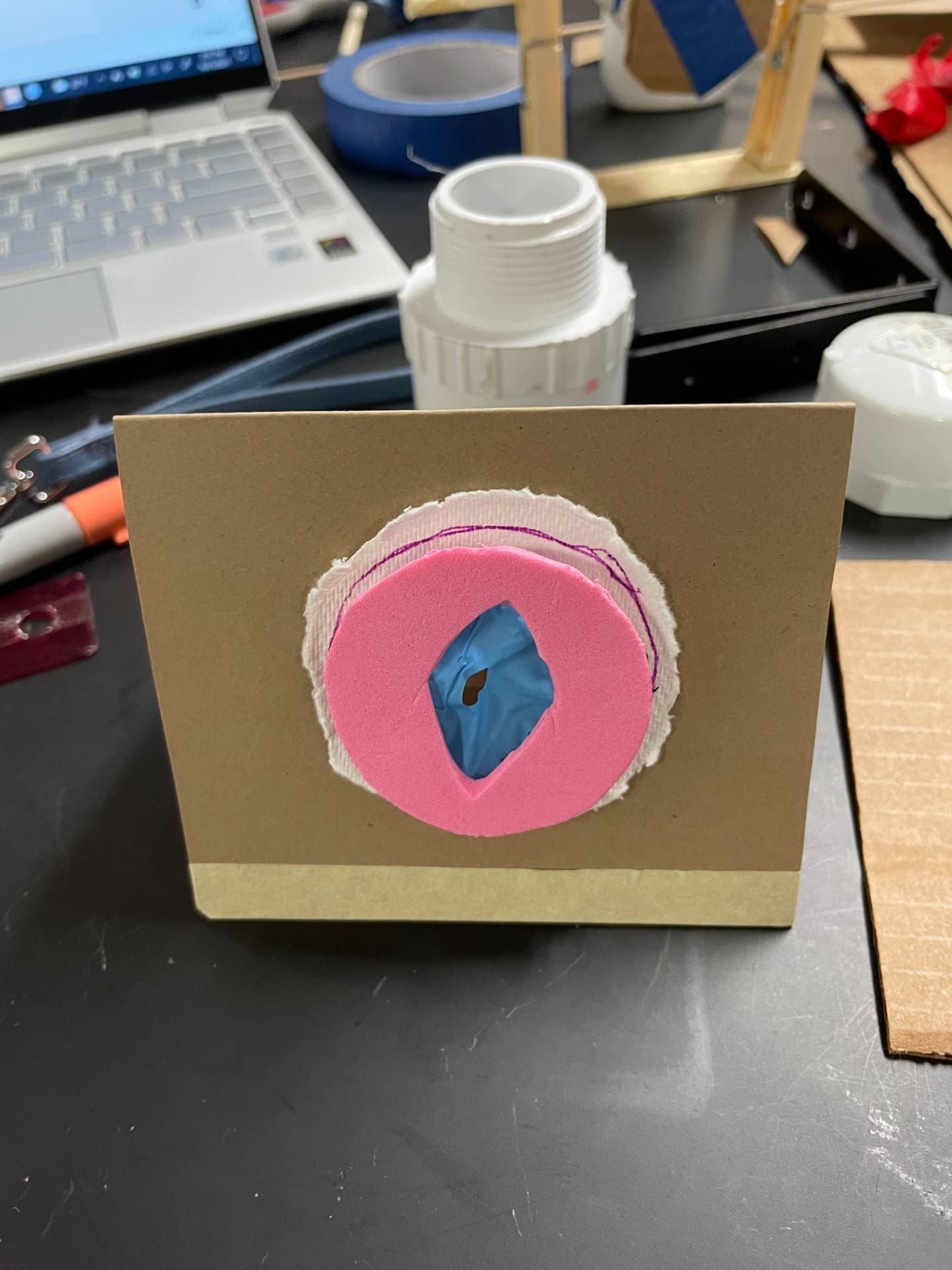
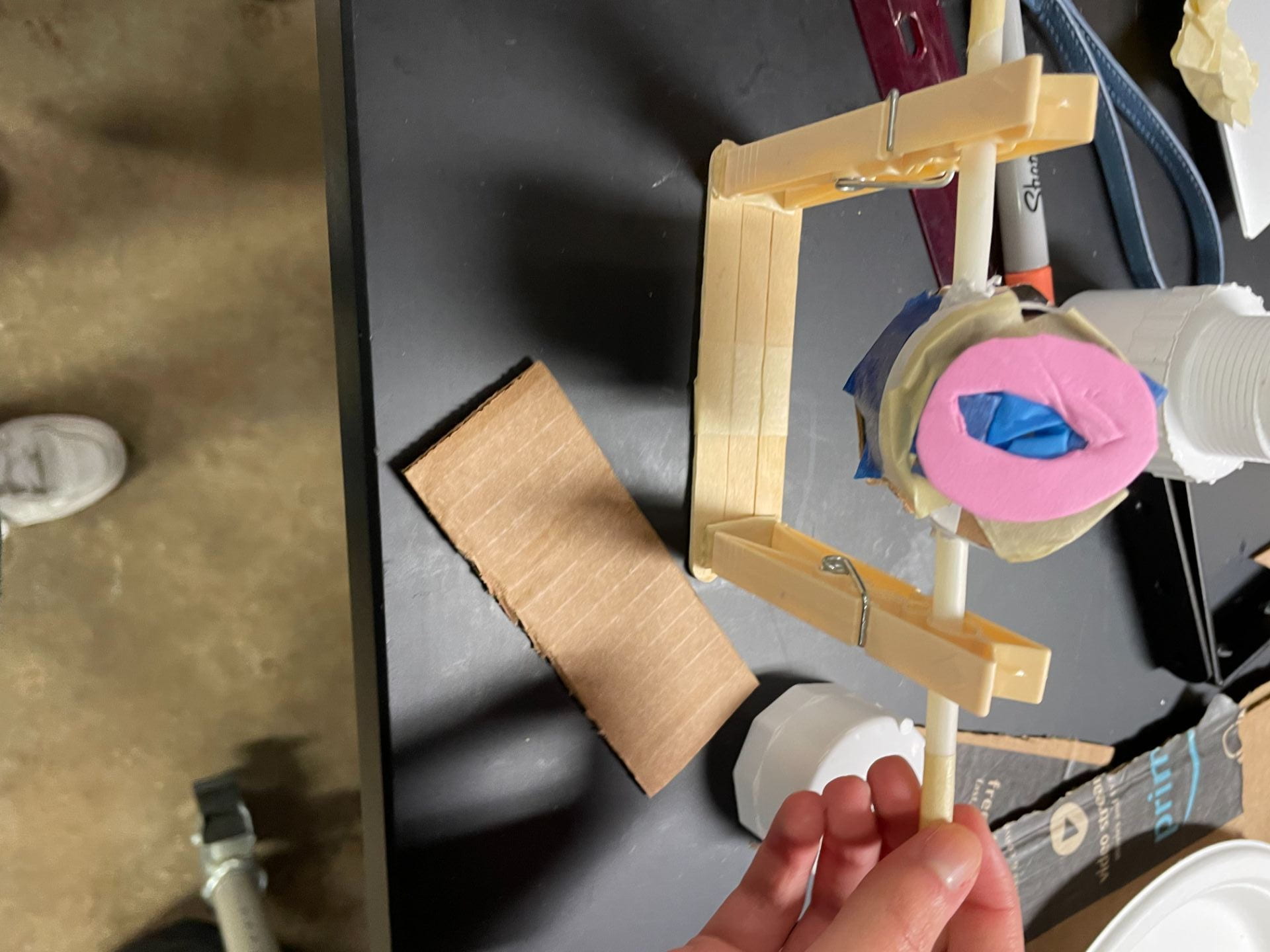
We decided to make a slightly higher-fidelity prototype of our swiveling model (especially since the low-fidelity one collapsed mid-Zoom meeting…), and attach a Dragon Skin 10M labia model we constructed using the scaled-down LUCIA labia mold we 3d-printed last week.
It actually worked quite well! The main challenge we ran into, however, was that the weight was imbalanced, so the model would only hang at the correct angle in the prone position. So we knew we would need to brainstorm and prototype some rotation lock options in Week 4. We’re currently thinking about adding grooves to the ends of the rod and a notch to the holes in the frame, so the user can simply set the rod into the notch at the desired orientation.
And, given the fact that we had to nail the labia into the cylinder in the model… we’d need to brainstorm better attachment methods of the labia/hymen to the base, so that different labia and hymen varieties can be easily interchanged during practice pelvic examinations.
So we went (somewhat) back to the drawing board on attachment methods. Should we use a screw-on cap? Well, that would be secure, but it might be hard to always twist it on in the right orientation. How about a snap-on cap? Well, that might still rotate after snapping on. Buttons? A bayonet mount? An embroidery hoop? We’ve definitely been stretching our imaginations on how to attach things to the base.
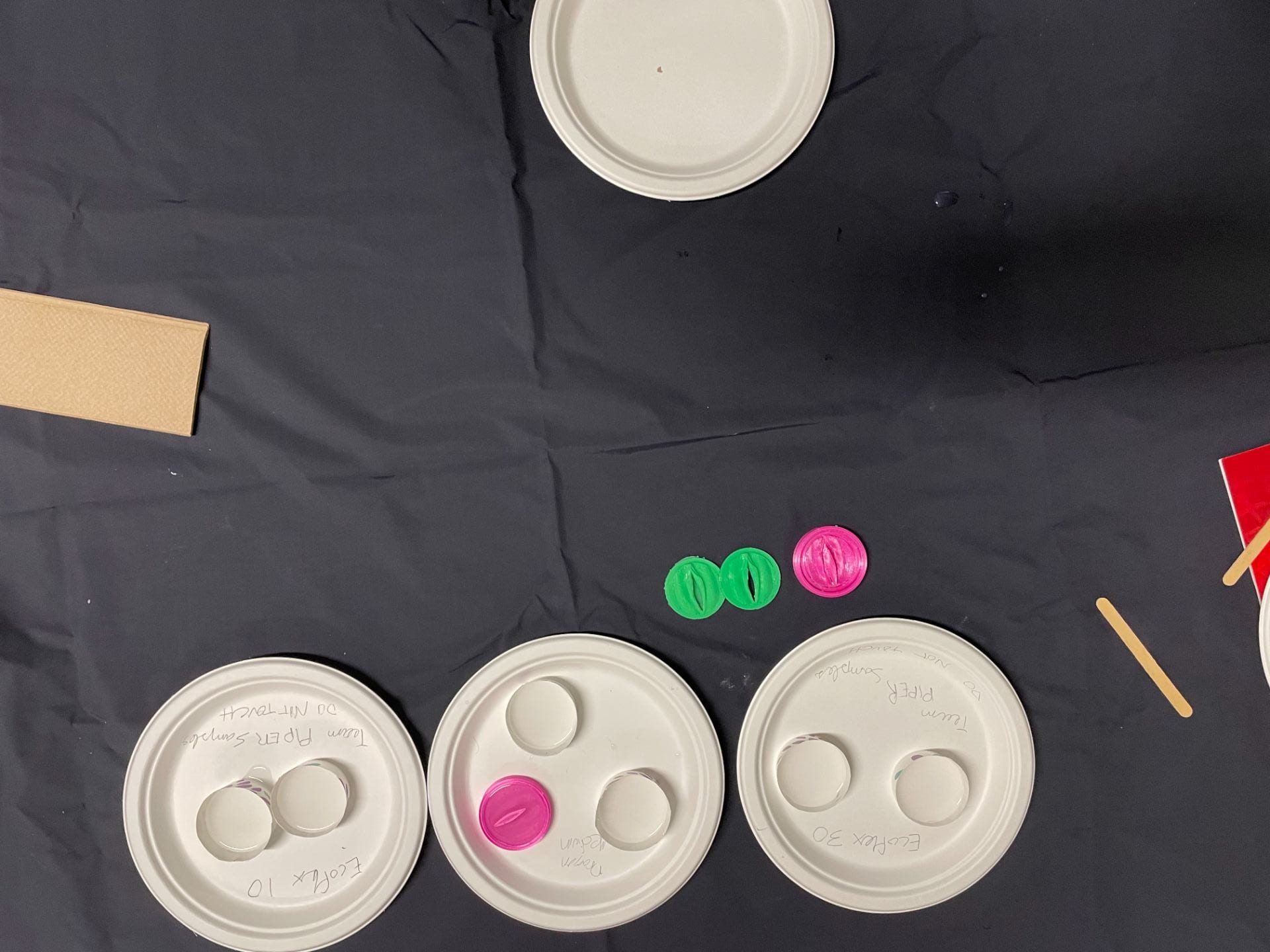
And meanwhile, we’ve also been stretching something else – silicones! We finally began testing materials for the labia and hymen this past week, and the results have actually been quite surprising. Since the LUCIA project uses Dragon Skin for their labia, we were expecting Dragon Skin to work the best for our project… but what we realized was that because our model requires nurses to separate the labia with their fingers, it needs to better mimic the elasticity of human skin. What we found was that a different silicone rubber, called Ecoflex 30, seems to be the most promising in terms of elasticity. However, as user feedback is incredibly important for a training model, we are working to get input from local pediatric gynecologists on our sample labia models.
This coming week, now that we have a functional model frame and labia mold, we’ll be focusing a lot on improving our hymen and labia prototypes, creating prototypes with more materials, and constructing attachment and rotation lock mechanisms. One thing we did realize, as you might be able to tell in the Dragon Skin labia picture above, is that it’s difficult to grip the labia and separate them, since there’s so little surface area on the side. Our client gave us that same feedback during our prototype demonstration. So this week, we’ll also focus on altering the CAD design of the labia mold to incorporate more surface area on either side of the labia to better facilitate labial traction.
Team PIPER after our midsummer presentation! 🙂
Overall, this week we dove headfirst into prototyping and the nitty-gritty of mixing and curing silicones, building frames, and working in CAD. But the mid-summer presentations at the end of the week made me take a huge step back and look again at the broader context of what we’re doing and why. I am genuinely so glad that our team has the opportunity to hopefully make such a significant impact on the quality and accessibility of clinical evaluations of pediatric sexual abuse and assault, and that we have such a wonderful support system at Rice 360 and the Texas Medical Center, full of people invested in helping our project succeed and encouraging us as people, friends, and colleagues. I can’t wait to see what these next couple of weeks bring.
Content warning: My project deals with pediatric sexual abuse. Please take care of yourself and feel free to forgo reading any parts of this blog.
Now for the fun part- prototyping! My team began this week by creating low-fidelity prototypes of the five bases that resulted from our screening and scoring matrices. We quickly ruled out two of the five, as we felt that they were not as effective and efficient as the other three options. That left us with three base options: flip, swivel, and twist. All three were viable options and worked equally well, so we chose to consult our client. She indicated that she liked the swivel option best, leading us to pursue this base and rotation mechanism.
Left: Flip; Center: Swivel; Right: Twist
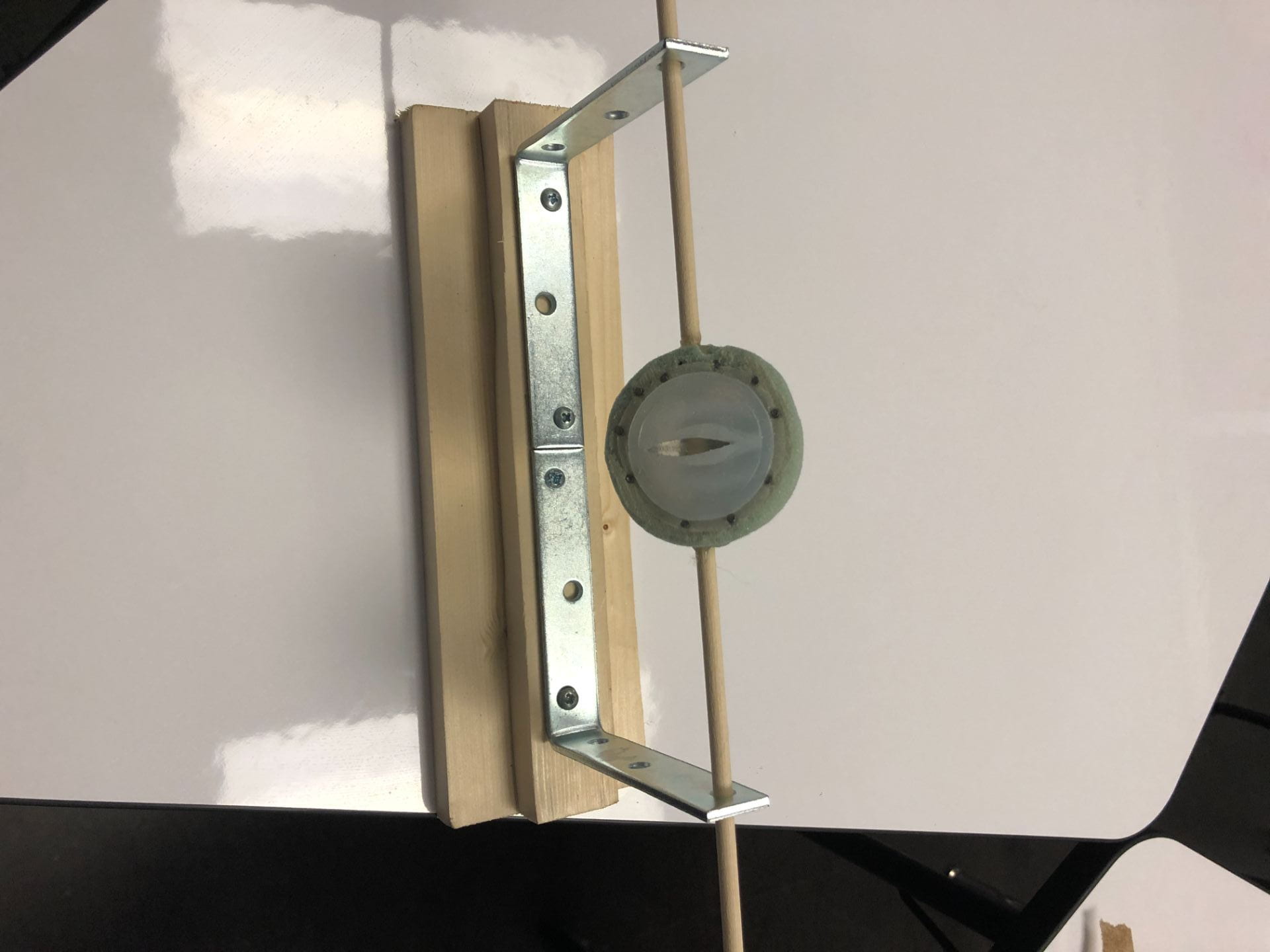
The swivel solution is a u-shaped base with a dowel rod running through it. A cylinder is permanently attached to the dowel rod. Different labia and hymen caps can then be screwed onto the cylinder. The model rotates by simply spinning the dowel and turning the base 180 degrees. Additionally, we plan to incorporate a notch system that will allow the model to lock into the supine and prone positions, as well as a variety of different angles to accommodate nurse position (sitting or standing, different heights, etc.). After our client indicated her satisfaction with the swivel base, we created a more medium-fidelity model of the solution that is sturdier and won’t fall apart when touched like our precarious low-fidelity model.
Medium-Fidelity Prototype of the Swivel Base
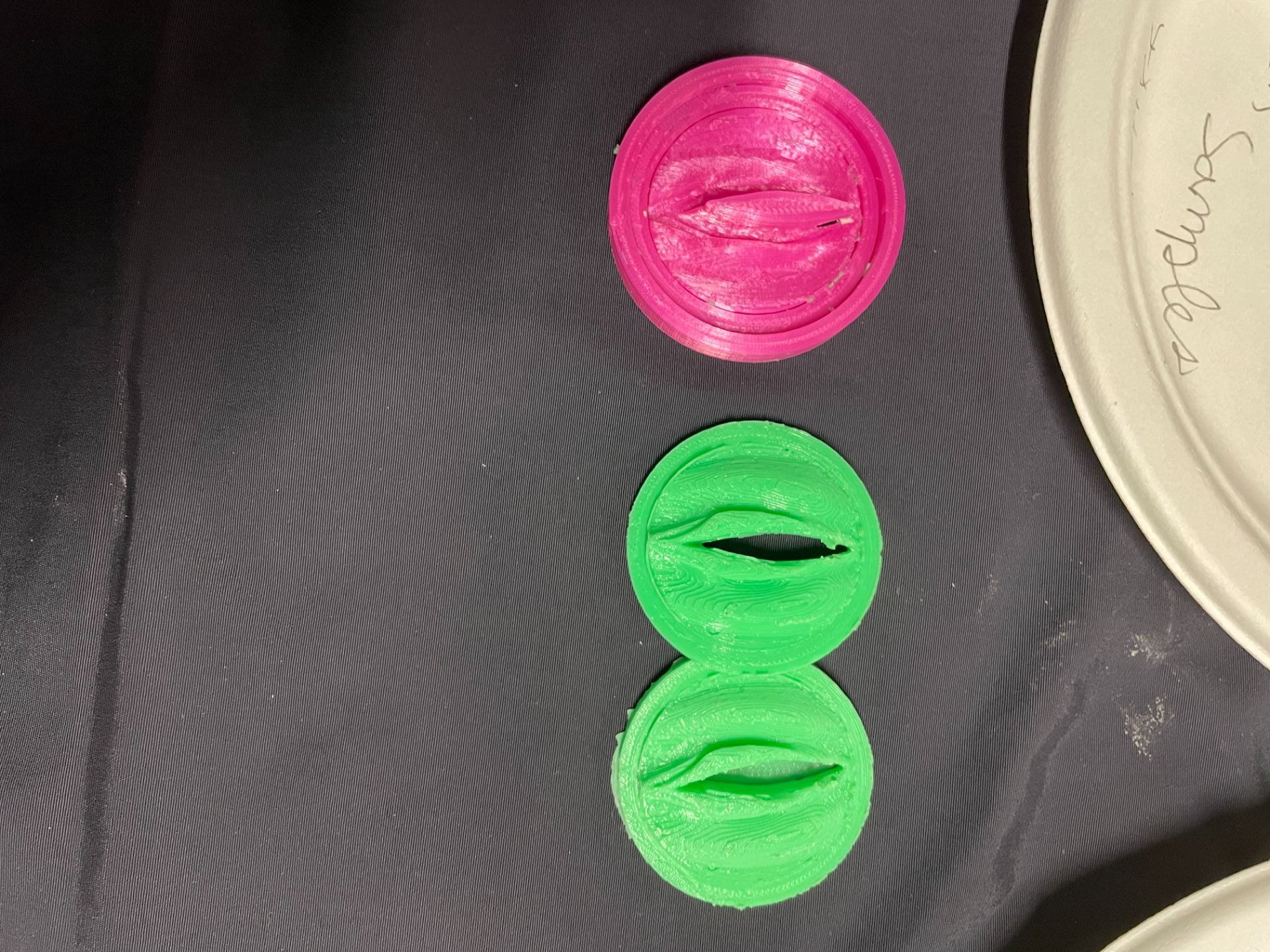
Concurrently, our team worked on modeling the labia and hymen. For the labia, we acquired the CAD files from LUCIA, allowing us to scale down their mold and use it to create our labia. We 3D printed the scaled down mold, then used silicone rubber to cast the labia. Satisfied with the detail and appearance of the mold, we began testing other materials to find the one that most nearly mimics skin in texture, elasticity, and appearance. Smooth-On is a company that manufactures many different synthetic skin products, and we were able to test different varieties of Dragon Skin and Ecoflex. As of now, we think Ecoflex 30 is the best skin alternative, but we have ordered a few more materials to try. Additionally, we are meeting with a gynecologist next week to get her opinion on which skin would be best to incorporate into our model.
Left: LUCIA labia mold and silicone rubber labia; Right: Materials testing of Dragon Skin and Ecoflex
As far as the hymen goes, we have two options. Option one is to extend the LUCIA labia mold so the vaginal opening is covered with a thin layer of synthetic skin material. We could then simply cut the hymen out of the extra material. We did test this method with some of our synthetic skin samples, and our client indicated that the hymen did move correctly when performing labial traction. However, another key aspect of the model is that the hymen falls due to gravity when rotated from supine to prone, and we are not sure if this method could accomplish that movement. Option two is to create the hymen separately from the labia and attach the two using some kind of silicone adhesive. We have created some low-fidelity hymen using slime and silly putty, and we will continue exploring this option as we begin to finalize our materials.
Left: Option one- cut hymen out of excess material; Right: Option two- create hymen separately from labia
On Thursday, Dr. Wettergreen, a Rice engineering professor with extensive design experience, stopped by to provide feedback on our design in the form of a prototype evaluation. Dr. Wettergreen was complimentary of our work, and he gave us numerous suggestions for enhancement. He recommended using an embroidery hoop to secure the labia and hymen and a bayonet mount to attach the two to the base. He also advised that we utilize a commercially available notch system to lock the dowel in place rather than trying to reinvent the wheel. This prompted our team to look into options like gears for the notching system. Overall, we are grateful for his feedback and ideas for further design iteration.
Friday marked the halfway point of this internship! They say time flies when you’re having fun, and that has held true so far! We were able to celebrate our accomplishments thus far with midsummer presentations, where we got to share our work with our colleagues. It was wonderful to see all the amazing work my peers are doing, and I enjoyed getting to share what Team PIPER has accomplished. I am proud of how far we have come and excited to see how far we will go.
Team pictures after our midsummer presentation!
Outside of work, the wonderful TAs created a campus-wide scavenger hunt for us! On Thursday, we had a yummy meal of Torchy’s Tacos, and then the hunt was on! It was a blast, despite the scorching Texas sun! My team ran over two miles around campus, searching for clues. I’ve realized I’m very competitive, as I was in it to win it. In the end, we tied for first place! Everyone was rewarded with Tiff’s Treats, and I loved my snickerdoodle cookie.
Scavenger Hunt Team 4 Pictures with Shivani and Kaitlyn!
Since we are at the halfway mark, I wanted to offer a bit of self-reflection. This internship has taught me that I am very much an external processor. I think out loud, especially when it comes to design. This can be both a blessing and a curse- a blessing because it allows my team to build off my ideas and a curse because a lot of my ideas are half-baked, which can lead to some confusion. Additionally, I have found myself getting attached to certain ideas. For example, I favored the swivel base over the other two options, and I would’ve been sad if our client chose otherwise. This realization will help me be more self-aware and open-minded in the future. Thus far, this internship has taught me so much about myself, and I can’t wait to see what the next three weeks have in store!
See y’all soon,
Shannon
P.S.- If you made it this far, I applaud you! These posts keep getting longer and longer, but I have so much to share about my amazing experience!
I think that one thing that can be challenging for me in the design process is keeping myself from getting overly attached to certain ideas – it’s easy for me to get excited about one solution that I think will work best. While my enthusiasm for promising designs can be a good thing, it also makes it harder to consider other options and perspectives. However, during this internship, I’m learning that keeping myself open to making (potentially large) changes throughout the designing and prototyping process is extremely important. This is especially true given our particular project, which is designed to be used in a setting very different from my own, and which is very dependent on user feedback. Although something may seem like it would work very well based on my own background and context, it may not be nearly as effective or efficient in other settings. In addition, by becoming too attached to one design , I am potentially missing the opportunity to create an even better final product, either by adapting that new idea or by combining it with my own.
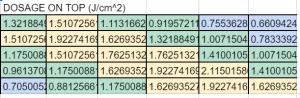
I initially came to this realization as my team was moving through our prototyping stage. After we had prototyped our two initial ideas, our team was very excited about the feasibility of our designs. We then, based on feedback from our international clients, began to work on performing exposure calculations in order to ensure that the various configurations of masks and UV bulbs which we were considering would actually supply the necessary dosages (approx. 1 J/cm2) to all of the masks on each mask-holding frame. In addition, we wanted to make sure that there were no huge disparities between the dosage received at different parts of each frame, as this could lead to some masks being insufficiently disinfected and others being overdosed (which can lead to degradation).
In order to do these exposure calculations, we created a spreadsheet, using the different grid-rectangles to represent points on a mask-hanging frame. Then, we used a formula into which we input bulb power, bulb length, bulb distance from the frame, and exposure time, and then received a dosage value for each point on the frame. This spreadsheet was color-coded to represent the dosage received.
We performed these calculations initially on our simple square mask-holding frame for the box prototype. By varying the height of the bulb in regards to the frame and adjusting the exposure time, we were able to achieve very promising results. We were particularly excited about the fact that we estimated we would be able to disinfect 1.2 masks per minute (our initial goal was 0.2). However, we thought that they could still be better, leading to the development of “Gertrude,” our third prototype. Gertrude, while larger than our original square mask frame, can fit two rows of about 6 masks. In addition, two bulbs would be suspended above and below this frame (one above/below each mask row). With this configuration, we were able to achieve even more uniform and reliable dosage in a shorter time – our masks per minute rate was 2.88!
Now, here is where my earlier self-reflection becomes applicable. After performing these calculations, I was very excited about the concept of moving forward with the square box idea, particularly with the new, double-row frame; it seemed to work mathematically, and appeared very easy to use. However, on Thursday, we had a prototyping workshop in which we were given the extremely strong advice by an expert to move forward with our cylindrical oil-drum concept (with a different internal frame) and disregard the box design due to the much higher accessibility and standardization potential of oil drums. This was very hard for me to accept initially, as we were essentially being told to take a number of steps back and return to brainstorming potential solutions which would be applicable with the oil drum. After discussing this feedback with one of our clients, we found that she also agreed, solidifying our future path. Over the next several days, we worked to come up with several new, promising solutions, and I quickly began to move past my frustration and back into a state of excitement. Although making such a big pivot was challenging, I have now realized it will also allow us to make an even better solution. Though at first it felt like much of what we’d done up until our redesign had been a waste of time, through reflection I have realized that all of our previous work led us to this point, and will help us to make even more informed decisions in the future.
Moving forward, our team will continue to prototype our new oil-drum frame ideas, as well as perform exposure calculations on them to determine their feasibility and effectiveness. By the end of this week, we hope to have a set design which we can move forward into higher-fidelity prototyping.
Outside of project work, we also did some fun intern activities this week! We had a group scavenger hunt around campus (my team tied for first place!) which was a great way to bond both with some of my teammates and with other interns. In addition, after our mid-summer presentations on Friday, we took some cute team photos!