Hello! Week three of this internship just ended, meaning we are already nearing the halfway point! It feels easy to dismiss the progress we have made, as these early weeks have been extremely background research and problem space oriented, but this foundation is pivotal to the success of our project. This week flew by as we had Monday off for Juneteenth. Thus far, it has been very exciting as our first week actually prototyping with our own design modifications as opposed to the exact kinetic hand model from e-NABLE. It was the first week, I made some progress on my personal goal of learning 3D modeling and CAD in fusion360.
This week we have made an extra effort into making sure that we are documenting our work every step of the way. Not only did a lot of this week revolve around finishing our design context review to ensure we had a comprehensive list on our resources and fleshed out version of our design criteria. Also, in order to be able to effectively use the little slots of time around workshops, we began making agendas. We created a general task list once at the beginning of the week, and then at the beginning of each day with more specific broken down tasks. Then at the end of the day, we went through and recorded what we actually had done. This would allow us to look back at what we had, both to have the sense of progress, for our daily standups, tech memos, and this blog!
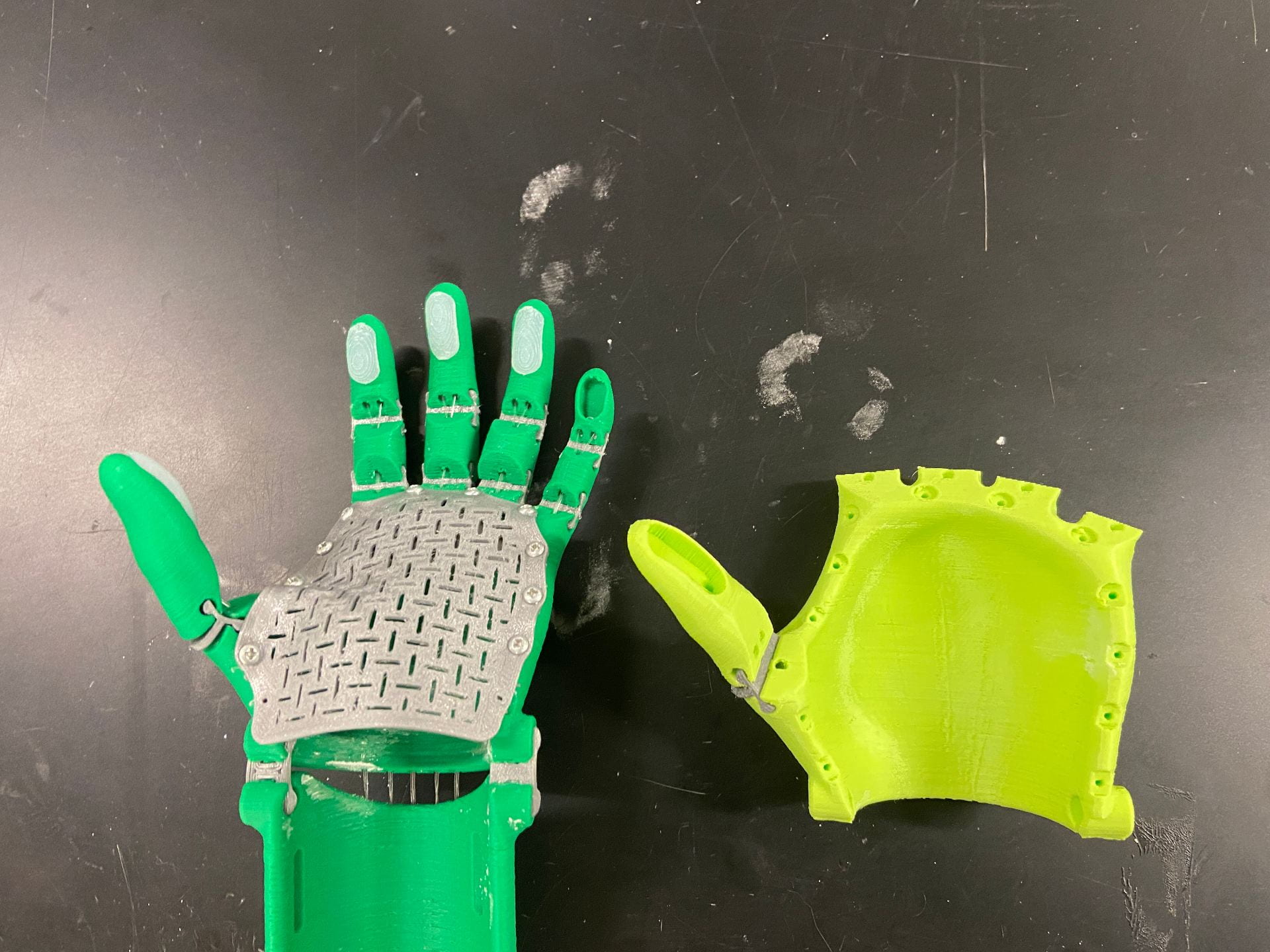
As for prototyping, we have started to make some major progress. After some discussion, we decided that the first flaw with the original model we wanted to tackle was the thumb placement. In the original model, the thumb was placed somewhat forward, and the pad of the thumb was facing the palm of the hand to allow the hand to grab things when the fingers contracted. However, as there is no need to hold small things in basketball, the thumb in this position would prevent dribbling and need to extend outwards so the hand was in a more open palm position. Rather than creating a new model from scratch or heavily altering existing versions, we found that with two simple changes, we could mostly move the thumb into the correct position. We shaved off a part of the original palm, and angled the base of the thumb.
Finally, this week we also started testing different silicon materials to put in place for the silicon finger tips. After testing out various silicons that the OEDK already had, we tested out 2 different types and found that one of them seemed perfect for us based on a qualitative evaluation. This brings us to our plan for next week, in which we hope to do some testing to get some quantitative results to validate the changes that we have made.